Summary
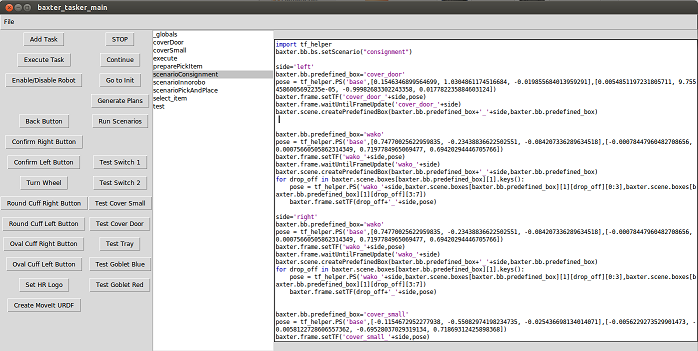
This ROS package called Baxter Tasker is intended for the Baxter Research Robot from Rethink Robotics. It has been created by Generation Robots, official distributor of Baxter in Europe. This ROS package offers an interface on both the controlling computer and on the robot. In particular this interface is designed to help users to setup a simple pick and place behavior, and automatically generate the corresponding Python code. Simple behaviors can be directly learned on the robot, whereas more complex behaviors have to be programmed in Python.
Overview
Who is it for?
This software it suited for Python developers who are new to Baxter, even if you already have experience in Python. There are a lot of tools to show how the stuff and access to the robot works. In this term the interface allows a quick start into the subject of the Baxter Research Robot.
What does it do?
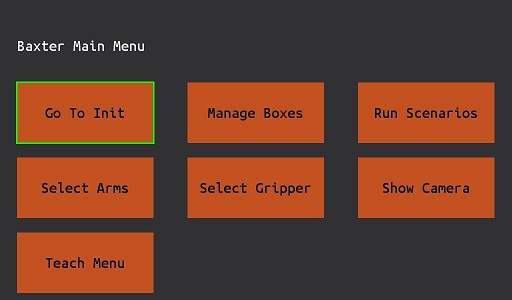
This software gives a general overview of Baxter's capabilities. There a lot of useful classes in Python that show the usage of the sensor data and how to control the robot. The basic interface uses
- the display,
- the buttons,
- the cameras,
- the arms,
- the infrared distance sensors,
- the leds and
- the sonar sensors.
There are also procedures to save trajectories and information about the environment. For advanced programmers, there are two classes where new functions could be added, which are automatically added to the graphical user interface. The classes offer an easy access to all of the robot's hardware.
Screenshots
What was used?
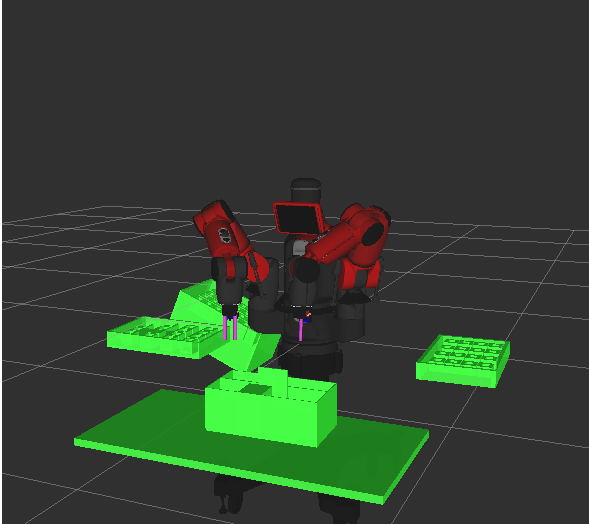
The Baxter Tasker is made for Python 2.7 with ROS Groovy/Hydro that uses the catkin builder. The current baxter-sdk is >=0.7.0 and it is tested on 32 and 64 bit systems. There is also an optional but recommended package called MoveIt, which was used to create a virtual scene around baxter. In this virtual scene, MoveIt! allows collision free planning options. Please read the included documenation, after you downloaded this software.
Video
Source code
Baxter_tasker is now available free of charge for download on our gitserver: git clone git@dev.humarobotics.com:baxter_tasker
To download the software we need a public ssh key from you. Contact us : baxter@humarobotics.com
Disclaimer / Licence
This software is graciously provided by HumaRobotics under the Simplified BSD License. HumaRobotics is a trademark of Generation Robots.
Copyright (c) 2013, Generation Robots. All rights reserved.
Redistribution and use in source and binary forms, with or without modification, are permitted provided that the following conditions are met: 1. Redistributions of source code must retain the above copyright notice, this list of conditions and the following disclaimer. 2. Redistributions in binary form must reproduce the above copyright notice, this list of conditions and the following disclaimer in the documentation and/or other materials provided with the distribution. THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS "AS IS" AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT OWNER OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE, DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON ANY THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT OF THE USE OF THIS SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
The views and conclusions contained in the software and documentation are those of the authors and should not be interpreted as representing official policies, either expressed or implied, of the FreeBSD Project.