Contents
Demo Mode
Demo Mode is a new run-mode for the Baxter Research Robot. Launched through the FSM, the demo mode provides a simple user interface, controlled through the arm's Navigator interfaces, which allows the user to demo some of the features of the BRR, as well as run Tare/Calibration routines on the robot.
Startup
The Demo mode is launched by Accessing the FSM, navigating to the Applications and selecting RSDK Demo Mode.
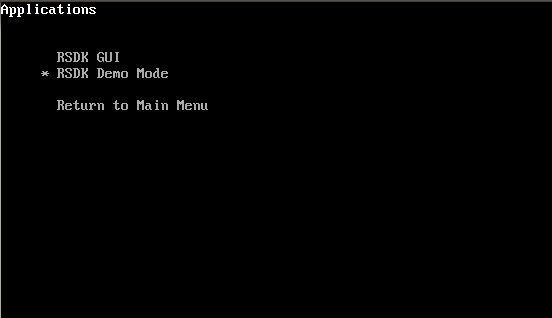
This will bring you to this Screen:
Use the scroll wheels on the arm navigators to scroll through the options, and press the middle “OK” button to select an option. The Back button will also function as a Back action in the UI.
Examples
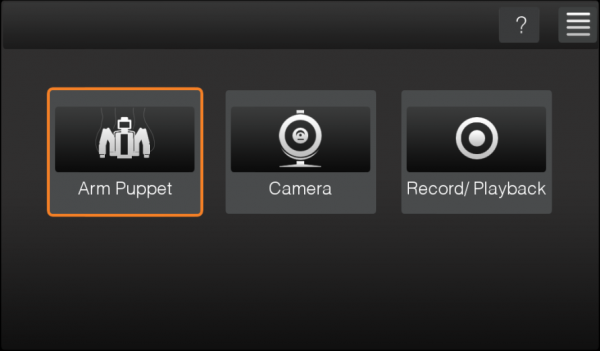
The first screen has 5 options: Arm Puppet, Camera, Record/Playback, Help, and System (the last two are icons).
Arm Puppet
This example will start the arm puppet example, with the arm you hit OK with being the arm mimicked
Camera
This example will let you choose which camera you would like to view, and will publish that camera to the screen.

Record/Playback
This example will allow you to record a motion, and play it back. To use this, you will have to select Record, move the arms through your desired motions, hit Back, and then select Play. Note that during and after the motion is played, Back button will return to Record/Playback menu.

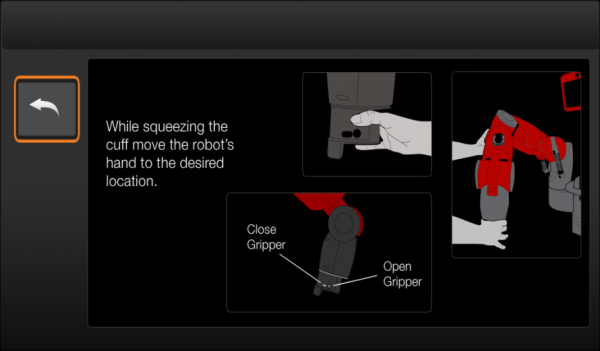
Help
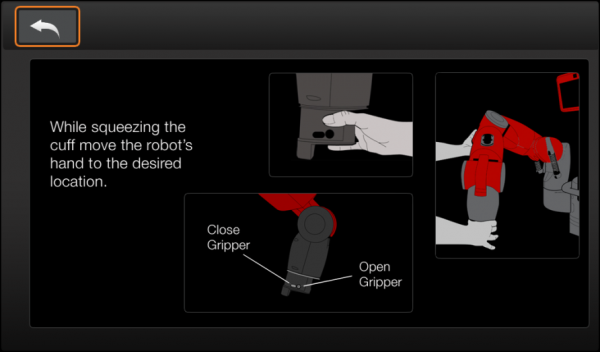
Selecting the "?" icon will take you to a screen with a Help graphic, describing how to interact with the robot.
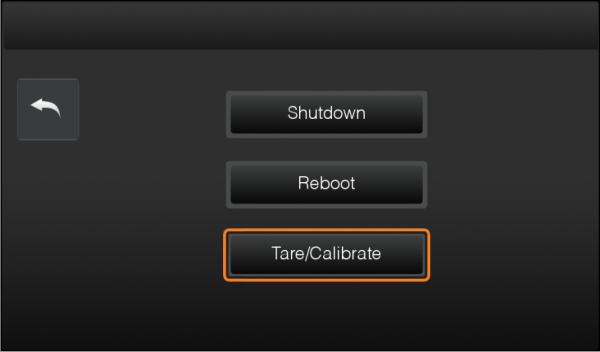
This menu contains options to shutdown or reboot the robot (It will reboot into Demo mode until you bring the FSM back up) or Tare/Calibrate the robot. The tare/calibrate routine in Demo mode runs through both tare and calibrate on both arms, rebooting in-between.