Contents
Gazebo Troubleshooting
baxter_simulator is built on top of the physics simulator, Gazebo. From time to time, even the best of simulators misbehave. If Gazebo is crashing as it is starting up, you've come to the right spot.
Checking Your Graphics Drivers
If you are seeing an error similar to the following console text, you may have a graphics card or graphics card driver issue:
[baxter - http://localhost:11311] foo@bar:~/ros_ws$ roslaunch baxter_gazebo baxter_world.launch
...
...
Gazebo multi-robot simulator, version 2.2.5
Copyright (C) 2012-2014 Open Source Robotics Foundation.
Released under the Apache 2 License.
http://gazebosim.org
Msg Waiting for master.[ INFO] [1418678113.711230072]: Finished loading Gazebo ROS API Plugin.
Msg Waiting for master[ INFO] [1418678113.711945157]: waitForService: Service [/gazebo/set_physics_properties] has not been advertised, waiting...
Msg Connected to gazebo master @ http://127.0.0.1:11345
Msg Publicized address: 192.168.53.23
X Error of failed request: GLXUnsupportedPrivateRequest
Major opcode of failed request: 156 (GLX)
Minor opcode of failed request: 16 (X_GLXVendorPrivate)
Serial number of failed request: 24
Current serial number in output stream: 25
gzserver: /usr/include/boost/thread/pthread/recursive_mutex.hpp:101: boost::recursive_mutex::~recursive_mutex(): Assertion `!pthread_mutex_destroy(&m)' failed.
Aborted (core dumped)
[gazebo-2] process has died [pid 497, exit code 134, cmd /opt/ros/indigo/lib/gazebo_ros/gzserver worlds/empty.world __name:=gazebo __log:=/home/qagroup/.ros/log/753a5942-849f-11e4-8411-7845c40d81aa/gazebo-2.log].
log file: /home/qagroup/.ros/log/753a5942-849f-11e4-8411-7845c40d81aa/gazebo-2*.log
......^C[gazebo_gui-3] killing on exit
[rosout-1] killing on exit
[master] killing on exit
shutting down processing monitor...
... shutting down processing monitor complete
done
Pthread mutex assertions? Yuck! Gazebo likes to use your GPU... a lot, but it's not getting the resources it needs from your current (likely open source) driver. One possible solution to this issue is to install the proprietary graphics drivers available for your computer.
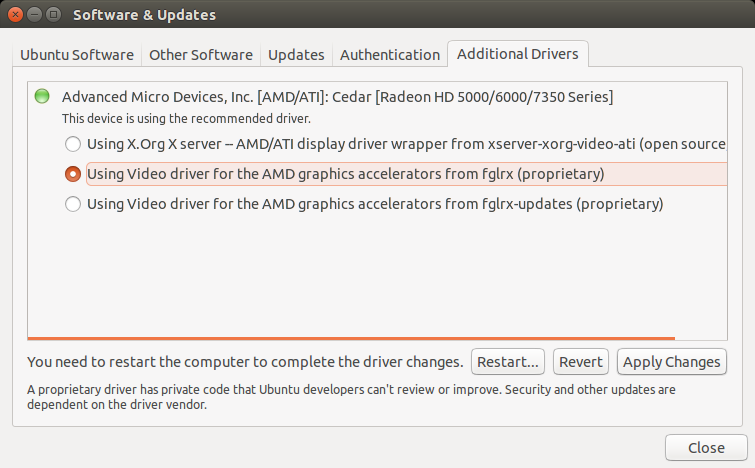
If you are using Ubuntu 14.04, search for "additional drivers":

Select your computer's proprietary driver. In this example it is AMD, but it could be NVidia or others based on your GPU:
Be sure to reboot your computer after the driver change! Then you should be able to launch baxter_simulator as normal.
Installation Errors
- Simulator installation failed with the below error
CMake Error at /opt/ros/indigo/share/catkin/cmake/catkinConfig.cmake:72 (find_package):
Could not find a configuration file for package qt_build.
Set qt_build_DIR to the directory containing a CMake configuration file for
qt_build. The file will have one of the following names:
qt_buildConfig.cmake
qt_build-config.cmake
Make sure that you have run the prerequisites before installing. If this error still persists, run
$ sudo apt-get install ros-indigo-qt-build
- Launching the gazebo simulator, fails with error messages.
Make sure that you are within the simulator mode and re-launch the simulator.
Connection Errors
$ ./baxter.sh sim
Make sure that your_ip variable is set properly to your ip address in the baxter.sh script, or manually set your ip address.
$ export ROS_IP=<ip address>
- None of the example programs are running or the topics are not being published with any messages.
Wait till the ROS_INFO, 'Simulator is loaded and started successfully' appears on your terminal before using the simulator.
Baxter Simulated Interface Issues
- Some of the interfaces are not working
Check the Simulator API page for the interfaces that would work.
Something else?
Try posting your question to the Gazebo Help Forum.