From sdk-wiki
| Robot Components : Robot, Arms, Grippers, Cameras, Head, I/O, Screen |
Contents
Using the Grippers
Hardware Overview
- Electric Grippers - The Rethink Electric Gripper is a parallel jaw gripper meant for lifting payloads up to five pounds. The gripper hardware has a 44mm throw and attachment points for a variety of finger configurations. The gripper software supports a wide range of speeds and grip force levels and is fully upgrade-able through Baxter.
- Suction Grippers - The Baxter Robot also supports the Rethink Pneumatic Gripper, onto which you can attach either a single vacuum cup or a multi-cup vacuum manifold.
Resources
Gripper URDF Customization
- Gripper Customization -- Nearly any electric grippers configurations can be represented in URDF to be seen with Meshes in RViz.
This guild will walk you through the process of editing on-board Baxter URDF with your custom gripper configuration. Additionally,
it is also a guide on methods for customizing your gripper properties (such as mass) or substituting your own custom gripper entirely! - URDF Configuration Example - Part of baxter_examples in the SDK. This is an example of a simple ROS node that shows how to add
segment and joint subtrees to the robot's model.
ROS API
See the API Reference Page for information on the ROS Interface to the Grippers.
Python API (baxter_interface)
Gripper interface class (gripper.py)
Examples
- Gripper Control
- Gripper Example
- Keyboard Gripper Control -- Move Baxter's arms around with your keyboard
- Joystick Gripper Control -- Move Baxter's arms around with a joystick
- Arm Positions Recording and Playback -- (Run in parallel at anytime) Record Baxter's arm movements live to a file and then playback the motions at anytime.
- Gripper Example
- Joint Position
- Joint Position Example
- The Joint Position control examples (keyboard & joystick) also allow you to control the grippers while also controlling the arms.
- Joint Position Example
Electric Parallel Gripper Preventive Maintenance
If Baxter’s electric parallel gripper jams or starts to make noise, it can be lubricated with the same Lubriplate DS-ES described above (Link here.) Follow the instructions below to lubricate the electric gripper.
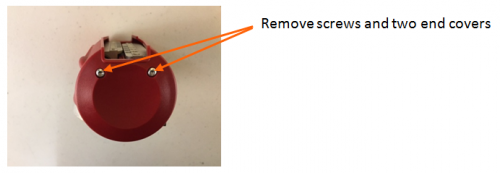
- Remove the gripper from Baxter's arm.
- Remove the two end covers from the gripper using a Torx T8 key.
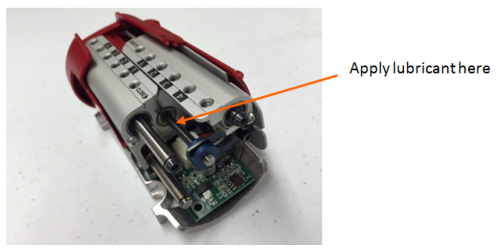
- Carefully place a small amount of lubricant on the lead screw on both sides of the gripper.
- Install the gripper on Baxter's arm (See [Electric Gripper Installation|here fro instructions).
- Open and close the gripper using Baxter’s Grasp button.
- Replace the two end covers on the gripper.