Zero-G mode
Zero-G mode can often be confused with the mode obtained by disabling the gravity compensation torques. By default, the gravity compensation torques will always be applied when the robot is enabled. In Zero-G mode, the controllers are disabled and so the arm can be freely moved across. In this case, the effect of gravity would be compensated by the gravity compensation model applying gravity compensation torques across the joints, there would be no torques from the controllers since they would not be active, and so the arm can be moved freely around, hence the name.
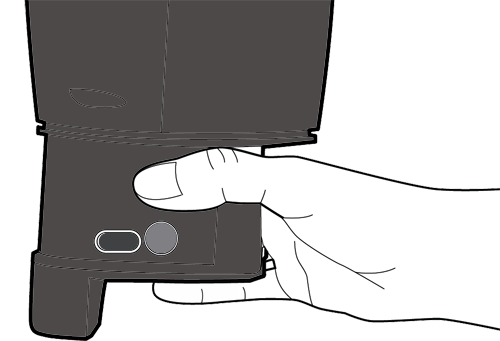
The Zero-G mode can be enabled by grasping the cuff over its groove as below,
Unlike the gravity compensation model, the Zero-G mode cannot be directly disabled. The cuff interaction has to be disabled in order to disable the Zero-G. Publishing an empty message to the topic /robot/limb/<side>/suppress_cuff_interaction at greater than 5Hz, disabled the cuff interaction.
rostopic pub -r 10 /robot/limb/<side>/suppress_cuff_interaction std_msgs/Empty